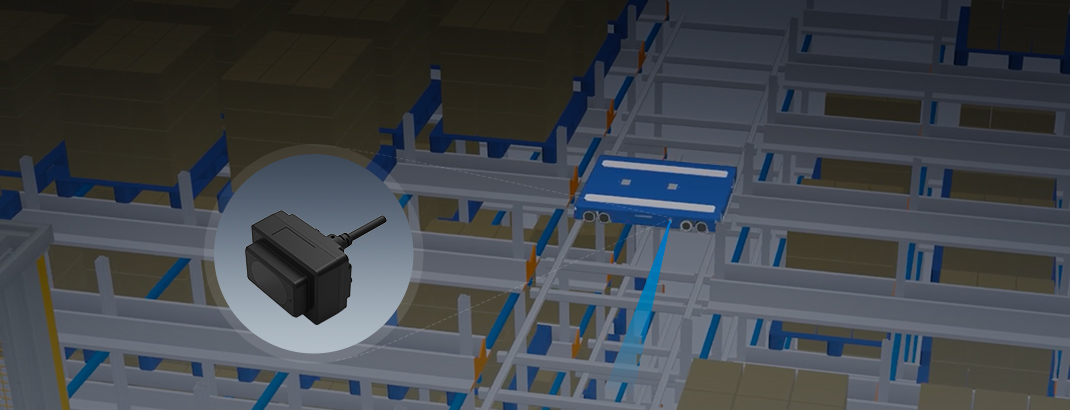
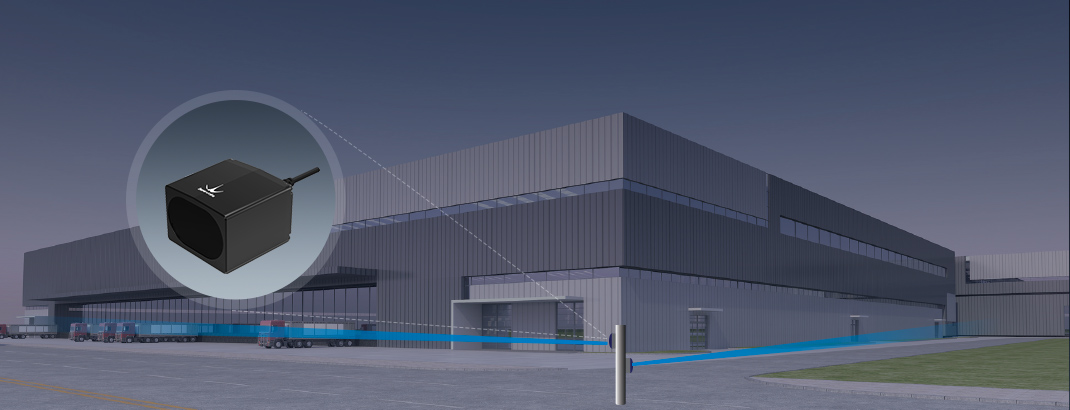
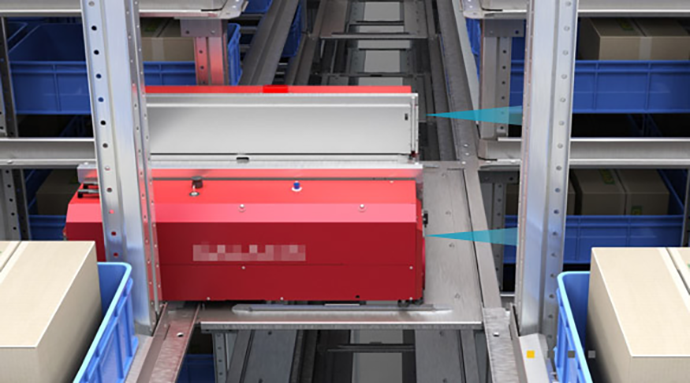
With the development of the logistics industry, manual labor can no longer support the vast logistics transportation system, leading to issues such as inaccurate data and management personnel being unable to respond promptly to stock shortages and congestion, which significantly reduces the operational efficiency of logistics transportation. To improve transportation efficiency and reduce overall transportation costs, Benewake has launched obstacle avoidance solutions to assist the industry in moving towards a more stable, flexible, and faster automation direction.
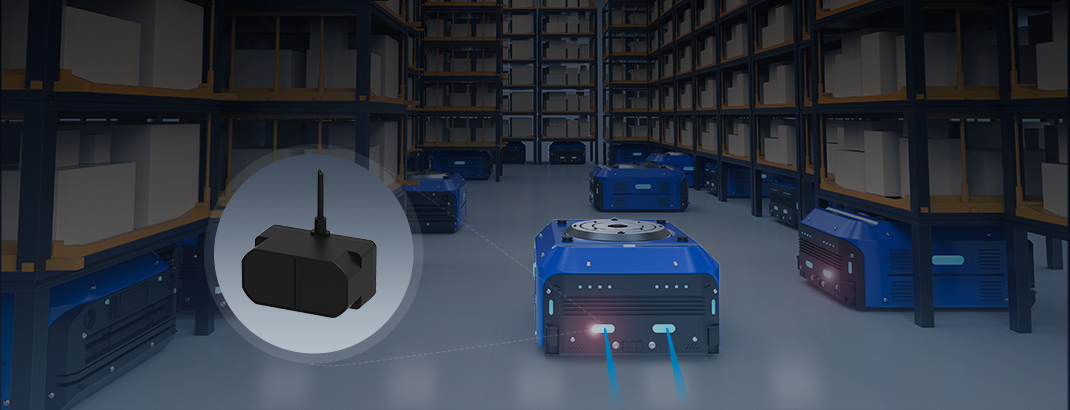
Nowadays, robots can be seen everywhere in our daily lives. There are various types of robots, such as industrial robots, service robots, inspection robots, epidemic prevention robots, and so on, which have brought us convenience in our lives. If robots cannot quickly and accurately perceive and measure their surroundings during their movement, they are likely to collide with obstacles or people, resulting in economic losses or personal safety accidents.