






































Headquarters:3rd Floor, Haiguo Jiaye Sci-Tech Park, Haidian District, Beijing, China

We use cookies to enhance your browsing experience and serve personalized content.
Reject ALL
Accept ALL


2025-12-02
What is Static Obstacle Detection?
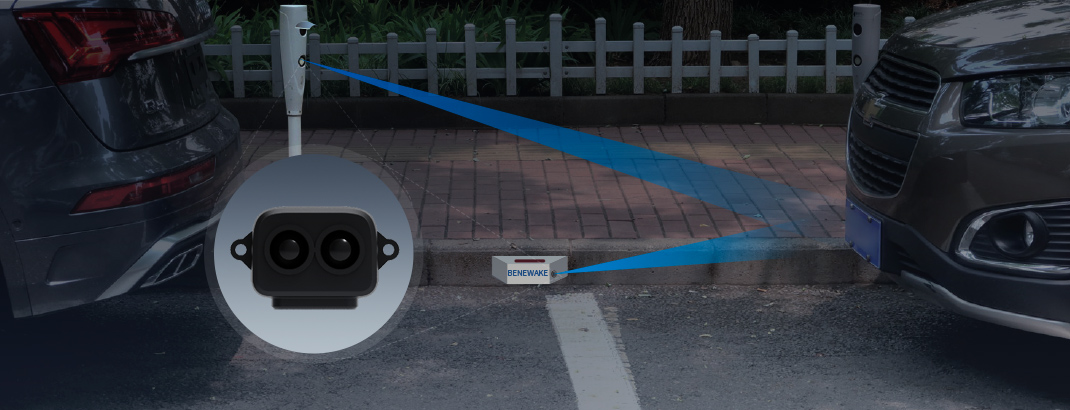
Static obstacle detection is the process of identifying objects that are stationary within an environment. These objects have a fixed position and do not move over time. Examples include walls, pillars, shelves in a warehouse, stationary machinery, and parked vehicles.
How It Works
The primary goal of static detection is to create a map of the immediate, non-moving environment. A sensor, such as a LiDAR, scans its surroundings to measure distances to nearby surfaces. The flight controller or robotic operating system uses this data to identify objects and build a local map. Because the objects are not moving, the system can reliably plot a path around them. This form of detection is fundamental for basic navigation and collision avoidance in controlled or predictable settings. The main challenge is ensuring the sensor can accurately detect objects of various sizes, shapes, and materials.
What is Dynamic Obstacle Detection?
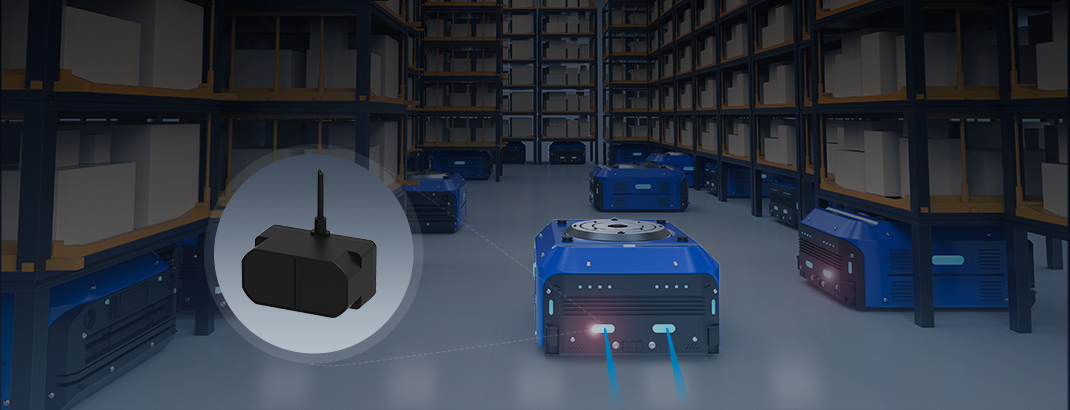
Dynamic obstacle detection is a more complex process that involves identifying and tracking objects that are in motion. These objects change their position and velocity over time. Examples include people walking, other moving robots or vehicles, and forklifts operating in a warehouse.
The Added Complexity
Detecting dynamic obstacles requires more than just identifying an object's presence. The system must:
1. Detect and Track: The sensor must first detect the object. Subsequent readings are then used to track the object's movement across multiple frames of data.
2. Predict Trajectory: By analyzing the change in the object's position over time, advanced algorithms can predict its future path and velocity.
3. Update Path Planning: The autonomous system must constantly re-calculate its own path in real-time to avoid a collision with the moving object. This requires low-latency data from the sensor and significant processing power.
The primary challenge in dynamic detection is time. The sensor needs a high update rate (frequency) to provide enough data points to accurately track a moving target and allow the system to react before a collision becomes unavoidable.
Introducing the TF-NOVA: A New Solution for Area Detection
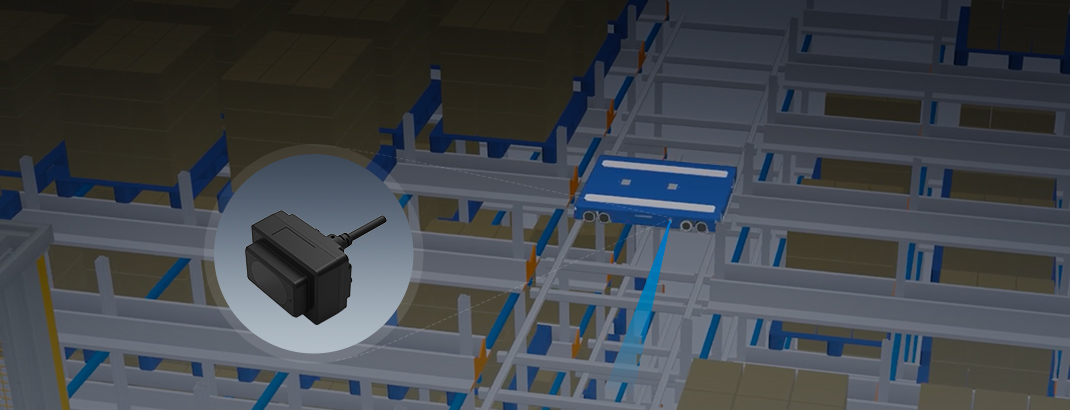
For system integrators developing compact robots and automated systems, the Benewake TF-NOVA proximity sensors in robotics offers a unique approach to obstacle detection. As the industry's first one-dimensional area detection solution, its line pattern laser beam provides capabilities that are highly effective for both static and certain dynamic detection scenarios in ground-based applications. The wide, linear field of view can detect low-profile static objects and moving obstacles entering the robot's path, all within a single, ultra-compact sensor.
Key Specifications:
· Range: 0.1m - 14m
· Field of View (FoV): 14° (H) × 1° (V)
· Frequency: 1 - 900 Hz (adjustable)
· Weight: ≤ 5g
· Size: 26.5 mm × 21.05 mm × 12 mm
· Interfaces: UART, IIC, I/O
The TF-NOVA’s compact size and versatile interfaces, including an I/O mode for simplified data processing, make it an innovative and cost-effective solution for enhancing the perceptual capabilities of modern robotic systems.
Benewake is a global LiDAR technology leader with hundreds of patents and a business presence in over 90 countries. We provide innovative LiDAR solutions trusted by top enterprises to build safer and more intelligent automated systems across industries like rail transit, civil aviation, and industrial automation.
Contact our team to discover how the TF-NOVA can be integrated into your next autonomous project.