






































Headquarters:3rd Floor, Haiguo Jiaye Sci-Tech Park, Haidian District, Beijing, China

We use cookies to enhance your browsing experience and serve personalized content.
Reject ALL
Accept ALL


2025-12-02
Obstacle Avoidance: Navigating Around Physical Barriers
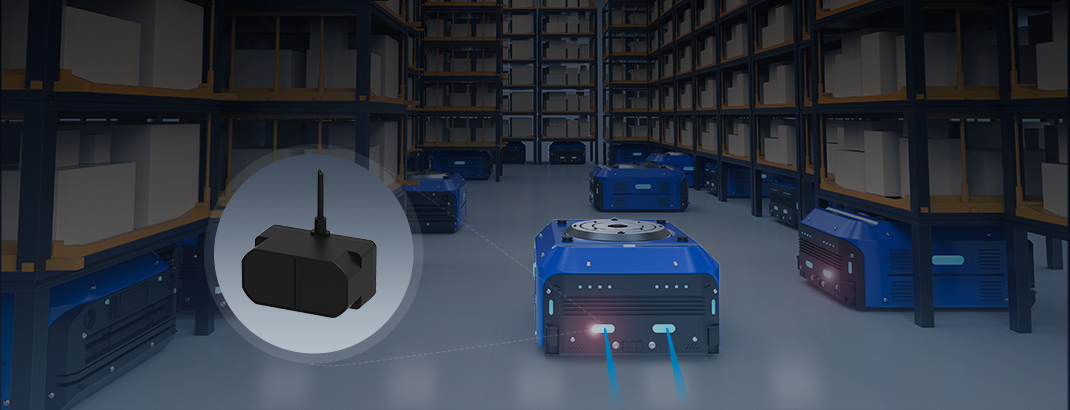
Obstacle avoidance is the function that enables a robot to detect and maneuver around objects in its path. Its primary purpose is to prevent collisions with positive or vertical obstructions. These can include a wide range of objects, such as walls, furniture, equipment, other robots, or people.
The Sensing Principle
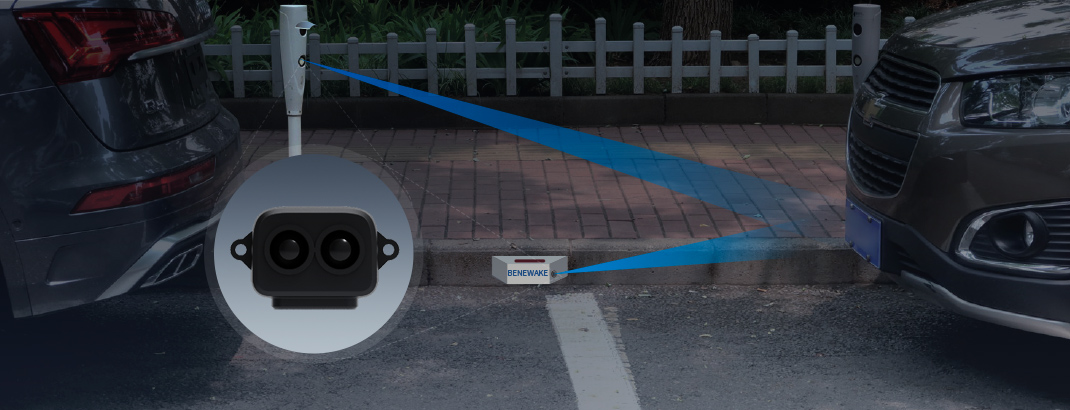
To achieve obstacle avoidance, a robot's sensor system is typically oriented horizontally, scanning the area directly in front of and around the platform. The sensor, often a LiDAR, measures the distance to objects within its field of view. When an object is detected within a predefined safety threshold, the system's logic triggers an avoidance maneuver—commanding the robot to stop, slow down, or navigate around the obstruction. This function is crucial for navigation in cluttered environments like warehouses, manufacturing floors, and public spaces.
Fall Prevention: Detecting Negative Obstacles
Fall prevention, also known as cliff detection or drop-off detection, is a specialized function designed to identify negative obstacles. Instead of detecting objects that rise up from the ground, it detects sudden drops or gaps in the floor surface. Examples include stairs, loading docks, ledges, and pits.
The Sensing Principle
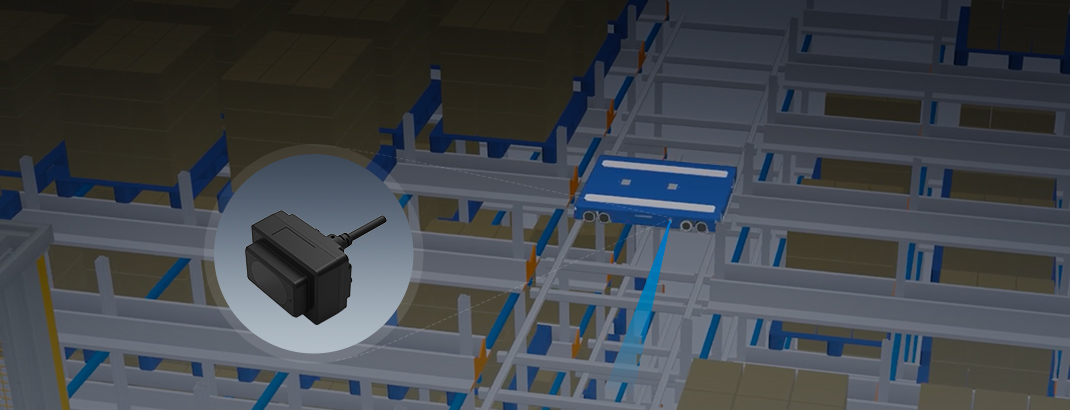
The sensing strategy for fall prevention is fundamentally different. The sensor is aimed downward at a sharp angle toward the ground just ahead of the robot. It continuously measures the distance to the floor surface. If the sensor reports a sudden, significant increase in distance—or a complete loss of signal—it indicates a drop-off. This data immediately signals the robot's control system to halt all forward movement, preventing it from falling. This capability is non-negotiable for robots operating in multi-level environments or areas with varied elevations.
Can One Sensor Do Both?
For system integrators, a key consideration is whether these two distinct functions can be managed efficiently. Using separate sensors for each task can increase cost, complexity, and system size. A more optimized approach is to use a single sensor with a field of view (FoV) wide enough to perform both functions simultaneously. By positioning a sensor with a vertical FoV correctly, it can monitor the path ahead for obstacles while also detecting the ground surface for potential drop-offs.
Introducing the TF-NOVA: An Integrated Solution for Ground Robotics
Benewake's TF-NOVA LiDAR robot proximity sensor is engineered to address this exact challenge. As the industry's first one-dimensional area detection solution, its unique line pattern laser beam is perfectly suited for simultaneous obstacle avoidance and fall prevention in compact robotic platforms.
The TF-NOVA's 14° horizontal FoV, when oriented vertically, creates a detection "line" that scans the area in front of the robot. This allows it to identify both vertical obstructions in the robot's path and immediate drop-offs on the ground with a single, ultra-compact sensor.
Key Specifications:
· Range: 0.1m - 14m
· Field of View (FoV): 14° (H) × 1° (V)
· Frequency: 1 - 900 Hz
· Weight: ≤ 5g
· Size: 26.5 mm × 21.05 mm × 12 mm
· Interfaces: UART, IIC, I/O
Its minimal size, low power consumption, and multiple interface options—including an I/O mode for simplified data processing—make the TF-NOVA a highly efficient and cost-effective solution for system integrators seeking to enhance the navigational safety of their robotic systems.
Benewake is a global LiDAR technology company holding hundreds of patents and serving clients in over 90 countries. Our LiDAR solutions empower leading enterprises to build safer and more intelligent automated systems.
Contact our team to discover how the TF-NOVA can provide a comprehensive perception solution for your next robotics project.