






































Headquarters:3rd Floor, Haiguo Jiaye Sci-Tech Park, Haidian District, Beijing, China

We use cookies to enhance your browsing experience and serve personalized content.
Reject ALL
Accept ALL


2025-12-17
As a company deeply involved in robotics and automation, we often encounter questions about the various types of proximity sensors used in modern robots. Understanding the differences between these sensors is essential for ensuring precise and reliable operation. In our experience, selecting the right sensor can greatly improve performance in tasks ranging from navigation to obstacle detection robot applications.
Infrared and Ultrasonic Sensors
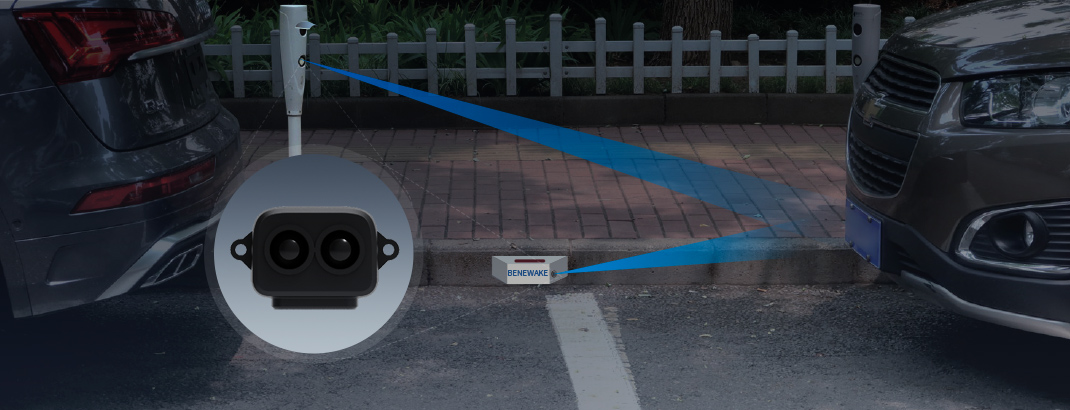
Among the most common proximity sensors are infrared (IR) and ultrasonic types. Infrared sensors detect objects by emitting light and measuring reflections. They are cost-effective and suitable for short-range applications but can be affected by surface reflectivity and ambient light conditions. Ultrasonic sensors, on the other hand, use sound waves to detect obstacles, offering greater range and tolerance to different surface materials. In our deployments of obstacle detection robot systems, we often find ultrasonic sensors advantageous when navigating complex environments with varying textures and lighting.
LiDAR and Time-of-Flight Sensors
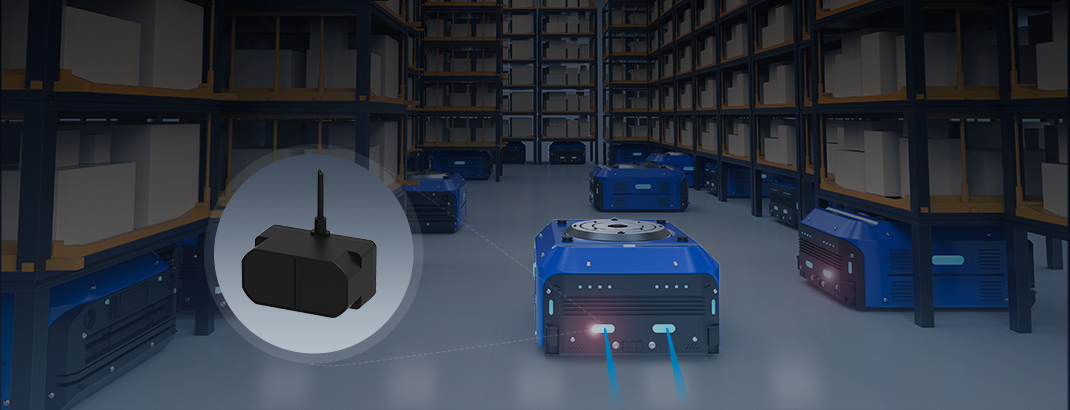
Another critical category includes LiDAR and time-of-flight (ToF) sensors. These devices provide precise distance measurements and are capable of generating detailed spatial maps. LiDAR sensors emit laser pulses and measure the return time, while ToF sensors calculate distance using the travel time of infrared light. We have integrated these sensors into obstacle detection robot solutions that require high accuracy for industrial and logistical applications. Their ability to detect objects at multiple ranges and with fine resolution helps us maintain safety and efficiency across different operating scenarios.
Capacitive and Inductive Sensors
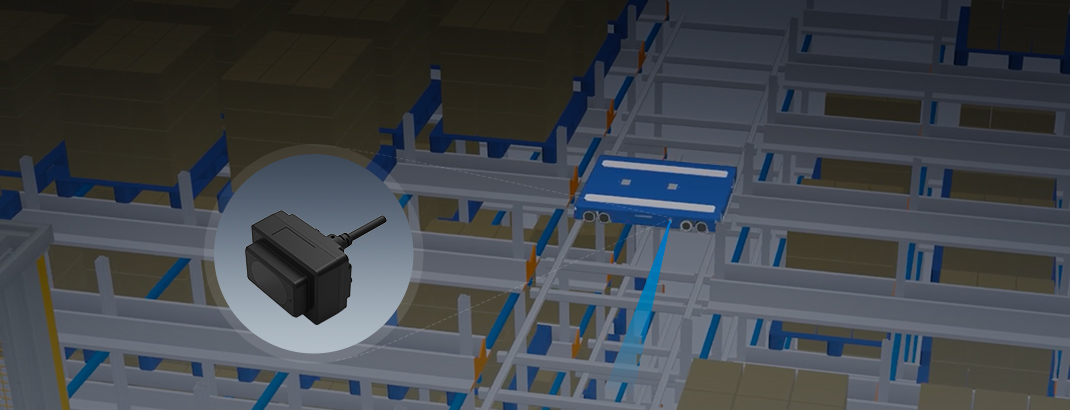
For applications requiring detection of metallic or conductive objects, capacitive and inductive proximity sensors are often utilized. Capacitive sensors respond to changes in capacitance caused by the presence of an object, making them suitable for detecting non-metal materials as well. Inductive sensors, in contrast, are specialized for metallic objects and are highly durable in harsh industrial environments. We rely on these sensors when designing obstacle detection robot platforms for material handling or factory automation, ensuring robust performance even in challenging conditions.
Choosing the Right Sensor for Your Robot
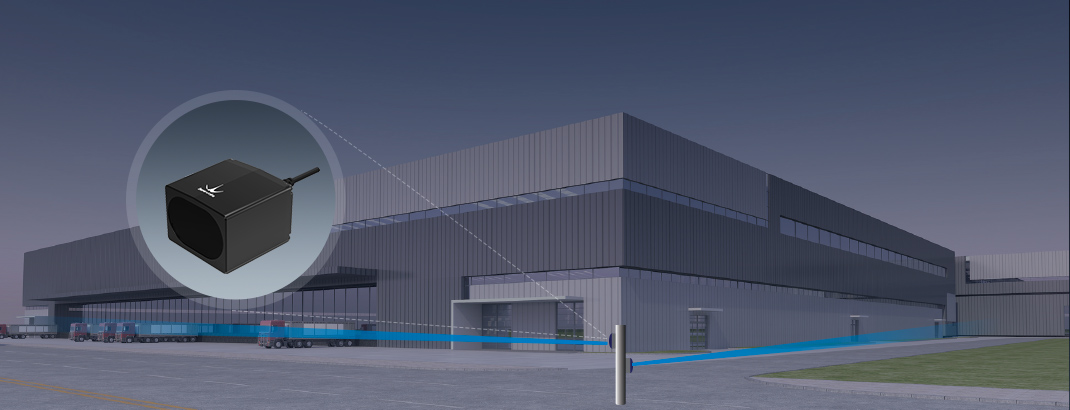
Selecting the most suitable sensor type depends on multiple factors, including detection range, environment, and target material. We carefully assess these aspects to provide customized solutions that meet operational requirements. Integrating the correct sensor type can enhance the robot's responsiveness, reduce errors, and extend system longevity. By combining different sensor technologies, we can deliver versatile obstacle detection robot systems capable of handling complex tasks with high reliability.
In conclusion, understanding the differences between proximity sensor types is vital for building effective robotic systems. At Benewake, we specialize in providing innovative LiDAR and sensor solutions that enable precise obstacle detection robot capabilities. Our products and expertise help clients improve safety, efficiency, and operational confidence in industrial and logistical environments.